
Тема номера
Коммуникационные технологии в управлении производством
Евгений Деревяго
Коммуникации между элементами автоматизации подобны нервам живого организма – только они способны донести до компьютера информацию, получаемую от датчиков, и, после выработки команды, довести ее до соответствующих исполнительных устройств. Без надежной сети с достаточной пропускной способностью ни одна система автоматизации работать не сможет.
В свете бесспорной победы распределенно-параллельных измерительно-управляющих систем над иерархическими вопросы коммуникационного обеспечения таких систем (требующих тотальной синхронизации) становятся не просто важны, но жизненно необходимы. Критичны почти все параметры. Только сетевая идеология, способная при высокой производительности обеспечить максимальную надежность и живучесть, а также массу других специфических параметров, может приемлемо обслуживать эти системы.
По отношению к технологическим процессам предприятие может быть разделено на две большие секции. Первая – это непосредственно контора, администрация, планово-экономические и другие службы обеспечения функционирования предприятия. Сюда же мы можем включить и службы подготовки производства (конструкторские, складские и пр.). Иначе говоря, мы отделили от цехов всю «надстройку» (включая директора), не влияющую непосредственно на течение данного технологического процесса на данном отрезке времени. Вторая группа относится к обеспечению производства именно к производства, как технологии.
Верхний уровень, ответственный за административное управление, стратегическое планирование, финансы и подготовку производства, обычно в достаточной мере обслуживается привычными высокоранговыми сетевыми технологиями. Мы не будем на них подробно останавливаться, поскольку это не основная тема нашей беседы. В зависимости от объема подобных работ и информационных потоков, используются все наиболее популярные технологии в совокупности с соответствующим программным обеспечением. Здесь можно встретить все версии сетевых технологий.
Огромный выбор коммуникационных устройств для высокоранговых сетей может завести в тупик даже специалиста. Дело вкуса, но, например, наш отдел сетевых решений, отдает предпочтение технике Digital Equipment, в наибольшей мере отвечающей строгим промышленным нормам. Это вполне понятно: DEC очень давно работает в сфере автоматизации производства и хорошо знает, как это делается (вспомните наши добросовестные копии ЭВМ серий PDP – знаменитые СМ). Кроме того, DEC является одним из родителей Ethernet – со всем вытекающим громадным опытом в сетевых технологиях. Несмотря на FDDI и ATM, Ethernet еще на долгие годы останется основной магистральной технологией для малых ЛВС, которые мы, в сущности, и имеем в виду, упоминая о конторе.
Редко, очень редко можно встретить в ЛВС предприятия узлы, отвечающие за реальную технологию, но такие вещи случаются. Так, например, американская компания Intelligence Instrumentation выпускает серию устройств связи с объектом EDAS-Ethernet, модули распределенного сбора и управления, работающие в сети Ethernet по интернетовскому протоколу TCP/IP. В некоторых случаях это может быть приемлемым, и такая возможность существует для некритичных по времени и не самых ответственных приложений. Дело, в основном, в недетерминированной природе высокоранговых протоколов. В угоду общей надежности и сохранению работоспособности при выходе из строя коммуникационных устройств и трасс высокие сети используют различные механизмы доставки, ориентированные на гибкую маршрутизацию, в зависимости от состояния устройств и текущего трафика магистралей.
Поэтому, в частности, сообщение, содержащее управляющее воздействие (например, сигналы, адресуемые исполнительному механизму, соединенному с модулем EDAS), могут либо вообще не достичь цели (при возникновении серии сбойных ситуаций), либо, посланные по «обходным» путям, достичь устройства слишком поздно. Аналогично обстоит дело и с сигналами обратной связи (от датчиков или аварийных сигнализаторов). В этой негарантирован-ности и непредсказуемости точного времени доставки и кроется неприемлемость подобных коммуникаций для управления технологическими объектами в реальном масштабе времени. Понятно, что такая «демократия» абсолютно недопустима для технологических установок, связанных с особо ответственными или опасными производствами.
В подавляющем большинстве случаев высокие скорости обмена технологическим коммуникациям не нужны. Типичный пакетик информации, передаваемый по магистрали, составляет от одного до нескольких байт ненормализованной цифровой информации. Ценится прежде всего надежность доставки и целостность информации. В большом почете дуплексность (одновременная передача во встречных направлениях), однако это, как правило, требует дополнительных проводов. Передатчик информации должен знать точно, когда его посылка дойдет до приемника. Тогда все пересылки становятся предсказуемыми (детерминированными) и могут строго математически учитываться при оценке устойчивости системы управления (теория автоматического регулирования никем пока не отменена). С теми или иными ограничениями подобная шина становится пригодной для работы в реальном масштабе времени.
Исторически технологи реального производства жаловали серийные соединения (RS232 или СОМ-порты). Двухпроводные магистрали позволяли с минимальными затратами и максимальной надежностью обеспечить соединение двух устройств с известной средней скоростью практически по любым двум проводам. 15-метровое ограничение дальности передачи было снято очень давно благодаря применению токовых петель и низковольтных дифференциальных протоколов (RS422). Вытянувшись более чем на километр, серийный протокол, затем, воспринял многоадресную технологию инструментального интерфейса IEEE488. Низковольтный дифференциальный протокол в совокупности с возможностью адресации до 32 устройств на одной паре проводов привел к появлению популярного для низкоскоростных коммуникаций протокола RS485. И RS422, и RS485 использовали стандартную идеологию СОМ-порта обычной персоналки и не требовали специализированного программного обеспечения. Обычно организация многоадресной (multidrop) магистрали RS485 обеспечивалась простым конвертором, преобразующим сигналы RS232 в сигналы RS422 или RS485. Устройство невысокой стоимости при габаритах пачки сигарет обеспечивает прозрачное преобразование протоколов, оставаясь для программиста и машины все тем же стандартным СОМ-портом. На индустриальных персоналках или контроллерах это стало стандартной опцией. С момента появления RS485 и до сегодняшнего дня не прекращается работа по развитию этой технологии. Увеличивалось адресное поле (до 250 устройств) и дистанции (десятки километров). После исчерпания скоростных возможностей стандартного СОМ-порта (115 Кбод) протокол RS485 решительно оторвали от серийного порта, «посадили» на скоростную системную шину компьютера и оснастили всеми привычными атрибутами сетевого контроллера (собственная память, микропрограммная база и т. д.).
Практически, на этом этапе многоадресный протокол RS485 превратился в сетевую идеологию уровня технологического управления. Явление получило название полевой шины (Fieldbus). Освободившись от медленного коммуникационного порта, крупнейшие производители начали оптимизировать RS485 с целью максимального приближения его к потребностям управления технологическими установками в реальном времени. Поэтому в основе физического слоя (physical layer) практически всех полевых шин лежит все тот же протокол RS485 как электрическое содержание среды передачи. Далее пришла очередь объединительного слоя (Data Link Layer) как свода правил движения информации по магистрали или логической формы. В этом вопросе разработчики довольно круто разошлись во мнениях, отражающих их убеждения и концептуальную ориентацию.
Для дискретного производства более приемлемыми кажутся пакетные по форме и асинхронные по содержанию протоколы типа Bitbus фирмы Intel. Однако асинхронность, на фоне ее внешней детерминированности и отзывчивости, оставляет все тот же вопрос о времени отклика на инициативу устройства. Практически устройству, намеревающемуся выдать инициативную посылку, придется подождать паузы межу пакетами. В худшем случае ему придется еще подождать, пока контроллер разберется с приоритетностью подобных запросов, если их несколько.
Для непрерывных (цикличных) производств более оптимальными выглядят цикличные по форме и синхронные по содержанию технологии типа Interbus-S. Непрерывное сканирование информации обеспечивает любому устройству гарантированное время доставки своего сообщения контроллеру – не дольше 14 миллисекунд для самой протяженной сети.
Независимо от объединительной технологии, этим сетевым технологиям ни в коей мере не свойствен «демократизм»: все операции передачи сообщений происходят с высочайшего разрешения головной «хост-машины». Все, чем располагают узлы сети, это возможность аварийного «писка» – возможность обратить на себя внимание. Опять-таки, даже в этом случае только «хост» может решить, насколько «писк» стоит обслуживания на фоне других запросов. Система приоритетов также определяется «хостом», уже не без участия оператора или программного обеспечения.
За неполные пять лет с момента появления термина «полевая шина» возникали и исчезали многочисленные варианты Fieldbus. Проверку временем, к моменту возникновения идеи объединения идеологии, прошли совсем немногие. То, что сотворили с серийным портом по дороге к Fieldbus, действительно похоже на чудо. Без всяких неожиданностей на финишной прямой оказались наиболее именитые, давно работающие в производственной автоматике фирмы. Это тандем Motorola и Echelon, General Electric, Rockwell Automation, Intel, Siemens, Phoenix Contact.
Нынешний год стал годом Fieldbus-технологий. Самые популярные реализации полевых шин сочетают высочайшую надежность, встроенные средства самодиагностики и быструю «отзывчивость» на события в узлах. Полевые шины могут использовать практически любые современные физические среды передачи данных и обеспечивают скорости до 15 Мбод (!). Fieldbus Foundation, организация, созданная для выработки единого стандарта совместимости полевых шин, в базу совместимости включила такие технологические схемы, как Lonworks, CAN, Device-NET, Interbus-S (IBS) и Profibus. Две последние системы появились в Германии и даже в этой компании грандов выглядят предпочтительнее. И если несколько авторитарный стиль концерна Siemens иногда отпугивает партнеров (по пальцам одной руки можно сосчитать американские компании поддерживающие архитектуру Profibus), то компания Phoenix Contact, создатель Interbus-S, удачной реализацией сенсорно-актуаторной шины заслужила популярность во всем мире. Клуб Interbus-S объединяет около пятисот фирм, поддерживающих и развивающих технологию Interbus-S. Из них более трехсот – производители разнообразных устройств для IBS. Определенно, это обеспечивает данной версии полевой шины наибольший ассортимент аппаратных средств, подключаемых в режиме plug'n'play из всех упомянутых полевых шин.
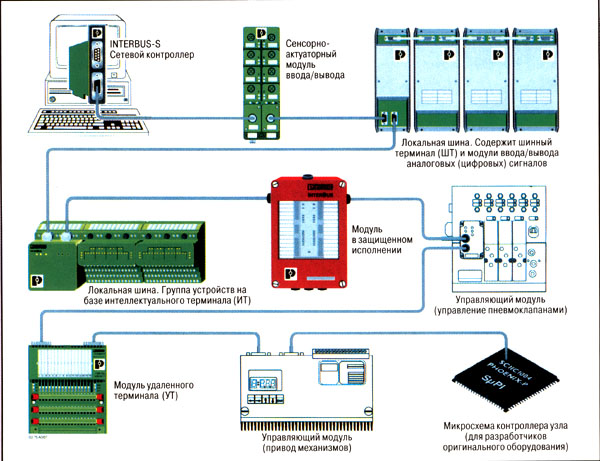
В связи с этим мы хотели бы ознакомить читателей с основами топологии и техническими характеристиками протокола Interbus-S.
Клуб поддержки технологии Inter-bus-S организован в 1993 году в Европе. Активными членами его в настоящее время являются такие известнейшие производители электроники и программного обеспечения, как, например: Balluf, Berghoff Electronic, Datalogic, Powersoft, Control Software, Robert Bosch, Schneider, IBM, ASAP, Emerson Electronic, Iconics, Inc., Lutze, Steeplechase Software, Tele-Denken Resources, Nema-tron, Synergetic Microsystems, Zia-tech, ICT, Intec Controls, Mannes-mann, Matsushita Automation, Rockwell Automation, Philips, Phoenix Contact, StromagAG, WAGO, Arbor Coast Software, Festo и многие другие с названиями, известными только специалистам различных смежных с автоматикой специализаций.
Этому способствовала открытая и понятная архитектура шины, простота реализации и подключения.
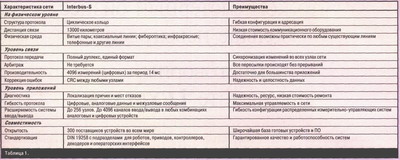
Основные данные технологии Interbus-S (см. табл.1).
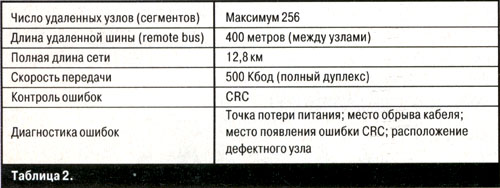
Техническая спецификация выглядит следующим образом (см. табл. 2).
Аппаратная реализация идеологии Interbus-S, осуществляется двумя микросхемами, разработанными компанией Phoenix Contact. Чип IPMS осуществляет все функции контроллера сети. Серийный микропроцессор SuPI отвечает за функции узла сети.
Физический принцип функционирования основан на сдвиговых регистрах. Вся сеть представляет из себя непрерывную линейку ОЗУ. За один полный цикл шины все данные, выставленные устройствами, сдвигаются в память контроллера, и одновременно все управляющие воздействия задвигаются в нужные устройства. В конце каждого цикла шины проводится CRC (cyclic redundancy check – контроль с использованием циклического избыточного кода), и только после этого и передаваемые, и принимаемые данные становятся действительными во всех узлах. Процесс циклического опроса сети, таким образом, происходит совершенно независимо и не может быть прерван. Обращение к устройству на шине сводится к чтению/записи некоторой области памяти, отображенной в основном адресном пространстве компьютера. В каждом цикле шины информация обновляется во всех устройствах сети. Если изменения не поступают, в узлы возвращается «старая» информация. Узел или устройство на шине может оккупировать столько бит (от одного и больше), сколько ему нужно для эффективной работы. Вопросы изменения конфигурации сети решаются после включения питания. Контроллер исполняет один идентификационный цикл (телеграфное сообщение) и по-
лучает в ответ типы устройств, их актуальное расположение на шине и полную логическую длину магистрали (в битах). После этого запускаются основные циклы сканирования шины, не прекращающиеся до выключения контроллера.
Кроме этого, Interbus-S поддерживает второй уровень так называемых локальных шин, представляющих собой небольшие встроенные сегменты, организованные на базе узла шины, оборудованного устройством шинного терминала (Bus Terminal). В отличие от базовой удаленной шины с уровнями сигналов RS485, локальные шины используют TTL-логику и предназначены для размещения устройств ввода/вывода в непосредственной близости от шинного терминала (обычно в одном корпусе). Через локальную шину обеспечивается и электропитание датчиков (или модулей).
Для работы с интеллектуальными устройствами (контроллеры, компьютеры и т. п.) Interbus-S предоставляет протокол РСР (Peripheral Communications Protocol) – он обеспечивает формирование и передачу длинных сообщений между устройствами и работает «поверх» основного цикла сканирования. Фактически РСР используется достаточно редко, так как работа на низком уровне предоставляет большую гибкость и скорость. Средства Embedded Messaging Protocol позволяют передавать сообщения вдоль всей сети для всех узлов.
Контроллеры Interbus-S в настоящее время существуют для любых популярных вычислительных конструктивов, встречающихся на производствах. Стандартные персоналки Intel, компьютеры Apple, Power PC
могут быть и контроллерами (IPMS), и узлами сетей IBS. Все специализированные конструктивы, такие как STD, STD32, PC/104, Compact PCI, также обеспечены программными и аппаратными инструментами для работы в сетях IBS. Обширна номенклатура готовых к применению на Interbus-S измерительных и управляющих каналов, а также целых комплектов реальных устройств автоматики (приводы, датчики с преобразователями и многое другое).
Мы представили вам одну из самых удачных реализаций сенсорно-актуаторныхсетевыхтехнологий уровня Fieldbus. Interbus-S предназначена для работы с чувствительными элементами и исполнительными механизмами в реальном времени с постоянным контролем. Удобная и простая в эксплуатации технология наряду со своей открытостью и производительностью является легко предсказуемой и просчитываемой, что крайне важно для систем измерения и контроля, работающих в реальном времени. Цикличность работы шины и гарантированная доставка информации делают ее оптимальной для непрерывного производства. Это же свойство обеспечивает высочайшую надежность, мониторинг и управляемость всехустройств сети, так как никакое устройство не может тихо «умереть» без того, чтобы контроллер не узнал об этом в конце следующего цикла сканирования (не позже чем через 14 миллисекунд!). И даже в таком критическом случае, после замены и подачи питания на систему, сеть автоматически конфигурируется за время не дольше максимального цикла сканирования (14 мс).